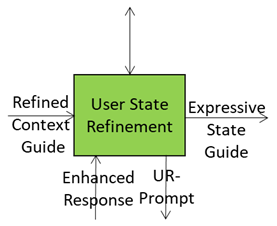
User State Refinement: Turning a Snapshot into a Full Profile
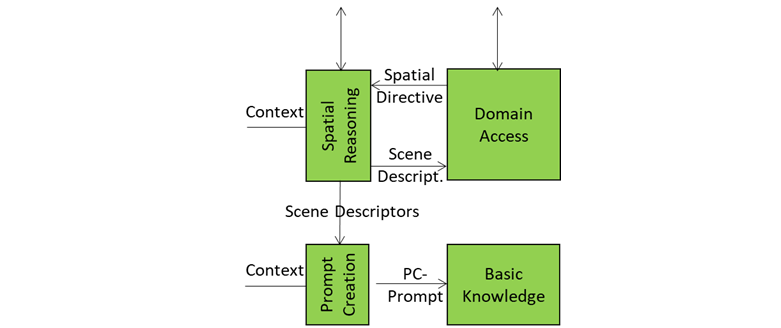
User State Refinement starts from a “blurry photo” of the User in the context (the initial User State) that includes a location, activity, initial intent, maybe a few emotional hints and adds to the “blurry photo” all the information about the User that the workflow has been able to collect. We have already presented the system diagram of the Autonomous User (A-User), an autonomous agent able to move and interact (walk, converse, do things, etc.) with another User in a…